|

ASH!
スペック
全長 350[mm]
全幅 246[mm]
全高 570[mm]
重量 3440[g]
腕機構
ロングロッド(ワイパーリンク)
足機構
スライダーカム(120度位層)
大会参加結果
第20会かわさきロボット競技大会
予選トーナメント
第一試合 不戦勝
第二試合 弱者の槍 敗北
予選トーナメント 敗者復活戦
第一試合 房騒−四季− 敗北
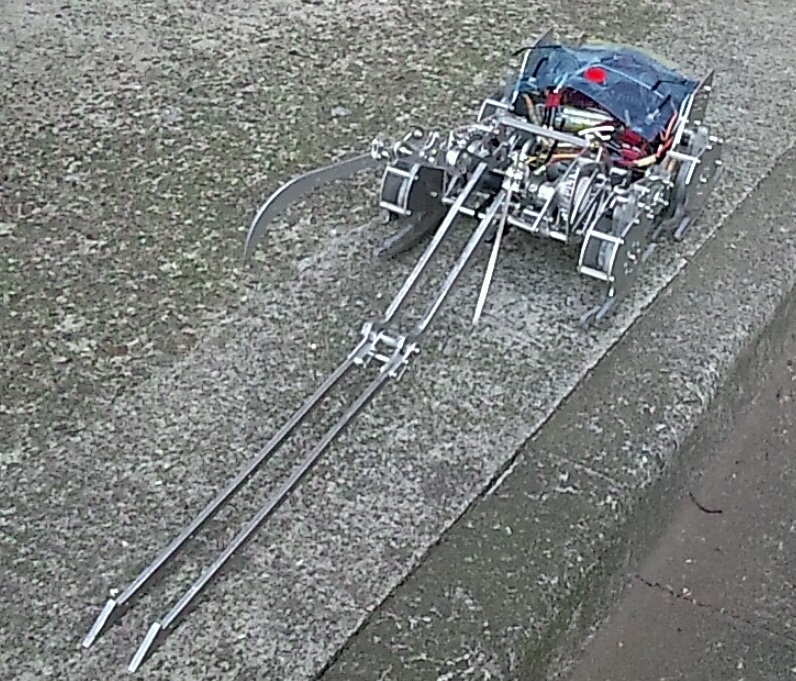
機体概要
整備性・組立性が良好であり,アーム換装が可能であることを目指し作ったのがこのロボット.
機体の構成は大きく分けて「アーム」,「脚」,「ボディ(本体)」の3つになっています.
脚の機構やアームのタイプやボディ等はどれもかわロボでよく見るものでまた単純なものではありますが,
アームの機構はやや複雑なものとなっています.
機体解説詳細
・ボディモジュール
・脚モジュール
・アームモジュール
ボディモジュール
脚モジュールとアームモジュールをつなぐところ.要するに本体です.
アームと脚のモータのスペースを優先した結果,かなり電装を置く場所というものが限定されてしまいました.
結果として後ろのスペースにバッテリーがギリギリ入り,その上にアンプや受信機を載せることに.
そうなるとケーブルのスペースもなくなり,その様は素人がやるパソコンの配線のようにぐちゃぐちゃです.初めは電装の保護カバー(機体後部の青い部分)はありませんでした.
けれども,転倒した際むき出しのアンプがフィールドの障害物に触れたり,相手機体のアームに晒されることを考えると恐ろしくて仕方がないので追加しました.
これのおかげで安心して倒されることができます.

左右のフレームは何枚かの板材を介し結合されていて,
この内の一枚を垂直スペーサを用いらずに嵌め込み式にし強度を向上させています.
これらの板材は機体の背部に集中しており,
左右のフレームは共に厚さ2mmのアルミの板を主体として構成しています.
そのため,アームユニットを取るとフレームの前方方面は容易にたわみます.

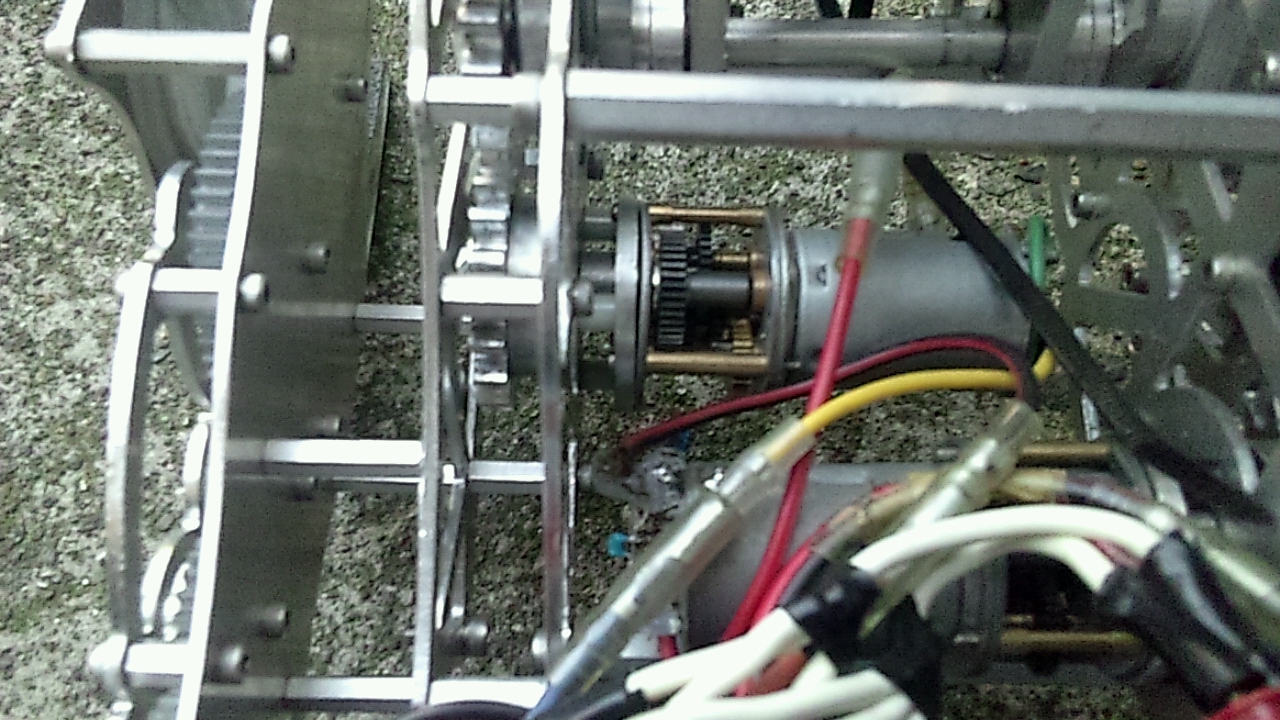
脚モジュール
動力は左右モータ各1個ずつで歯車によって伝達しています.最終減速比は36:1となっています.
クランクをカムとすることによる利点はなんと言っても部品点数の削減.
それに加えて脚ユニットの幅を抑えることができ,換装アームのためにより大きなスペースを確保が可能.
以上の利点からこの機構を採用しました.
そして,より機構を単純化させるために歯車とカムクランクを直結.
しかしこのせいで歯車に脚が干渉し動かなくなることがしばしばありましたので
後に歯車と脚の間が空くようにワッシャーを仕込みました.
歯車は一部を除きKHKの歯車開発ソフトを使用し,NCで切り出しました.
モジュールは1です.歯車の穴にはベアリングを用いておらず伝達効率はそこまで良いとは言えません.
ギヤードモータの軸に繋ぐ歯車は市販品を加工したものを用いております.
連結方法は歯車のハブに開いた穴に合わせて,ギヤードモータの軸に穴を開け,
それをピンで結合する手段を取っています.
当初はギヤードモータの軸に追加工する予定は皆無で,
加圧片で軸を圧迫して摩擦によって連結するという特殊な歯車を用意していました.
その歯車のスペック上では滑ることはないはずで,事実初めはそうでした.
ところが何度か取り外した後,摩耗したのかまったく動力を伝達できなくなり現在の仕組みに変更.
最終的にはなんとか動くようになりました.
しかし,これらのつぎはぎのせいか左右で脚の速度が異なります.
なおこのギアトレインの軸方向の抑えとなっているパーツ,
内側の脚の稼働部分と幅方向のラインが同じです.
設計図では数ミリ隙間ができるように作っていました.
けれども,スライダーの溝やカムの溝に少し余裕を持たせていたせいで脚がぶつかることがあります.
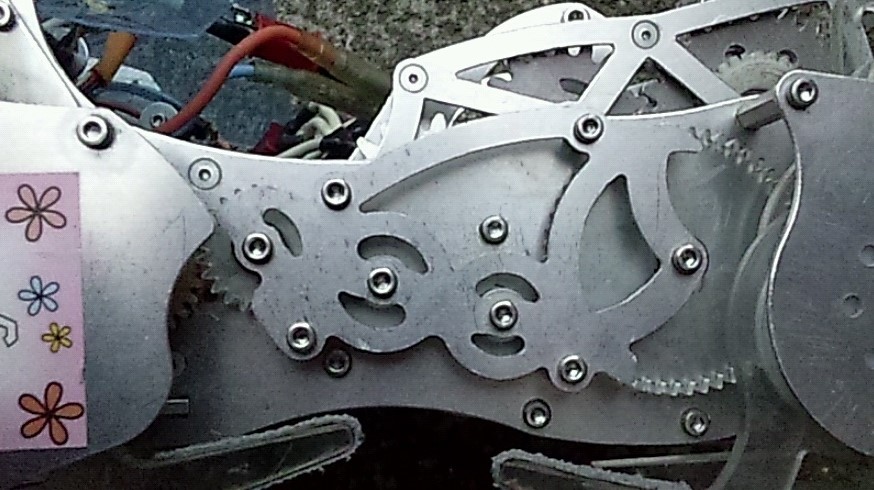
アームモジュール
動力はモータ2個でそれぞれ歯車によって426:1に減速.
左右のクランクを回し,それらを繋ぐ軸によってパワーを合わせています.
そして,クランクから連接棒により揺動節に動力を伝達,その揺動節を延長させてアームとしています.
モータのトルクを合成するのが何回か減速した後だったのでクランク位相がずれやすくなってしまいました.
ロングロッドアーム単体では相手機体を持ち上げるのに大きなトルクが必須.
しかし,機体より遥か前方に回転支点を作ってしまえば
自重によるモーメントが加わり大きなトルクが不要となります.
したがってその支点を作るカウンターアームも合わせて作成しました.
第20回かわさきロボット大会からルールが変わり,
動力からアームまでに揺動節を組み込むことが参加条件の一つとなりました.
この際にただ4節リンクを用いるだけでなく若干工夫を加える必要があると考え,
カウンターアームとロッドアームを一つのリンク機構の中に入れました.
リンク機構はヘッケンリンクの仕組みで,
コンロッドの延長をカウンターアーム,揺動節の延長をアームとしました.

上の写真がスタード時の体制となります.
なお,このアーム機構のギヤードモータと歯車の連結は脚と同じような方法を用いています.
以前はスリットカラーで軸をはさみ、スリットカラーと歯車を連結していました.
しかし,脚の歯車の滑りで摩擦で軸を抑えることへの募る疑心が現在の連結法へと至らせました.
後になって考えてみると,こちらはきちんと締めれば滑ることはなくて
先輩にも使用している方がいたので無理に今の仕様に変える必要もなかったでしょう.
ちなみに部内で模擬戦を行った際にアームの軸部分に相手のアームがうまくハマって絡まって
そのせいで相手のギヤボックスの中の歯車が破損するという事件がありました.
|