|

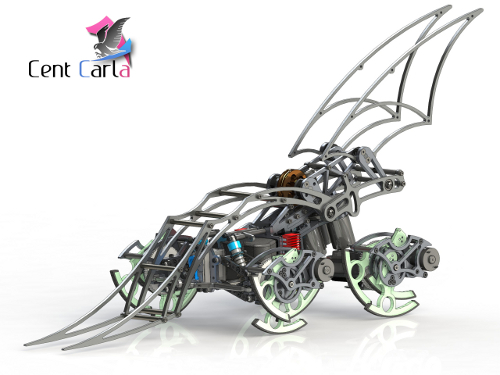
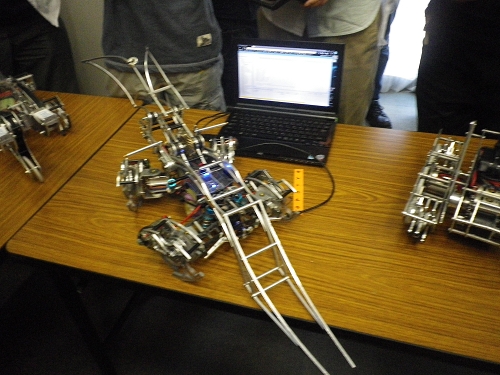
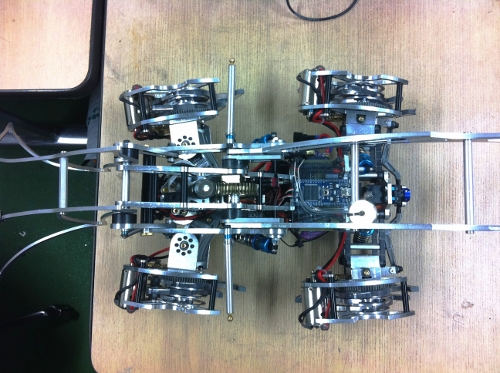
セントカルラ
全長 712[mm]
全幅 250[mm]
全高 328[mm]
重量 3490[g]
腕機構 ロッドアーム(てこクランク機構) 380モータ3個 最終減速比300:1
ウォームギア使用
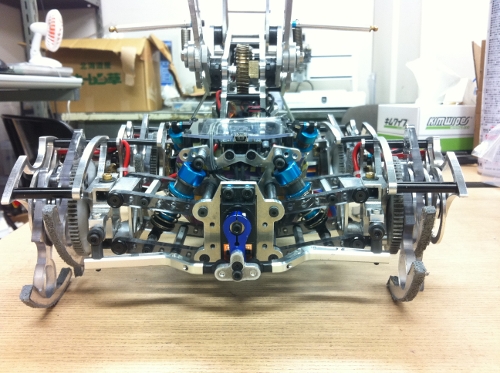
脚機構 120°位相ヘッケンリンク機構 380モータ各1個計4個 最終減速比30.24:1
ステアリング機構 フロント:サーボモータMG995R×1(リンク機構) リア:MG959×2
サスペンション機構 フロント:ダブルウィシュボーン式 リア:ピボット式
制御 mbedマイコン(チャンネルミキシング、サーボ制御、転倒復帰用モーション、LED)
大会参加結果
第19回かわさきロボット競技大会出場
決勝トーナメント出場
決勝トーナメント第1回戦敗退
ユニーク賞受賞
KHK杯2012出場予定
2年前に設計・製作した機体を改良し、ようやく完成形に近づきました。
コンセプトデザインは"いかにハイスペックを詰め込めるか!?"
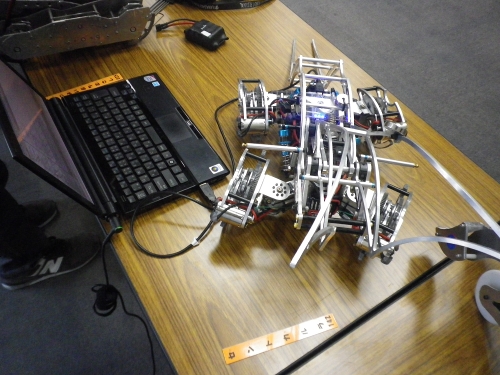
セントカルラに実装されているモータの個数はサーボモータも含めると10個。
多くのモータを制御する必要があるため、制御IC(mbed NXP LPC1768)を搭載。
受信機からの信号をミキシング(マトリックスに289パターン)した後、
線形関数的にモータドライバとサーボモータをそれぞれ速度・位置制御する。
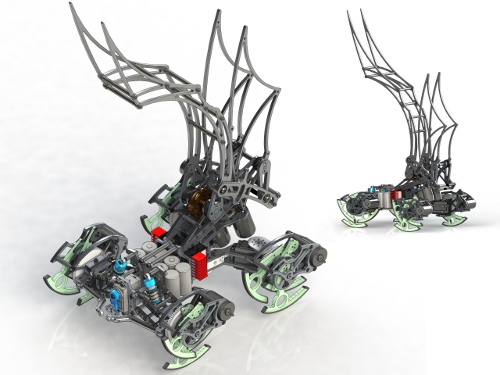
この制御により前後の脚がステアリング動作し、曲線的ななめらかな旋回が可能に。
また、それぞれの脚はユニット化しサスペンションが4脚独立に効いているため、
不整地走行における高い走行能力を実現。
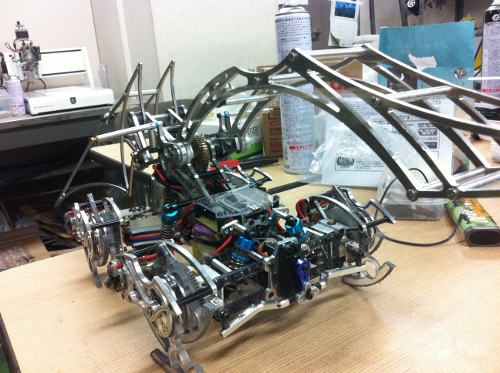
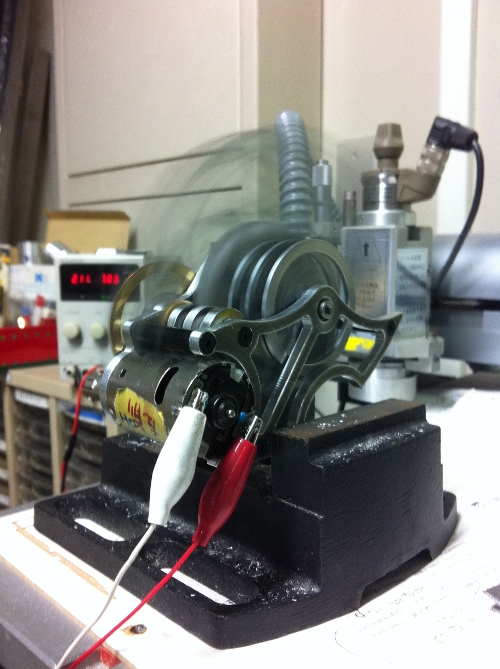
アームに関しては、ウォームギアを採用しため非常にコンパクトな減速機・モータユニットとなっている。
特に、スタートと同時に展開するクランクアームは、以下の図のように規定寸法に収まるよう設計されている。
他にも、転倒防止及び落下時の衝撃吸収に役立つ後ろ羽根(アーム部と引きバネによりリンク)を実装。
また、アームと後ろ羽根と後脚を使った転倒復帰モーションも可能。
ここまでで、セントカルラには多くの機能やギミックが詰め込まれていることがわかるかと思う。
ロボットの由来
2年次に製作した機体「迦楼羅〜カルラ〜」が他大学の機体名と丸かぶりしたため、
「中央大学のカルラにしよう」→「中央のカルラ」→「セントラル・カルラ」→略して「セントカルラ」ということに。
ちなみに、迦楼羅の名はメンバーが阿修羅展から拾ってきました。迦楼羅はインド神話に登場する神鳥。ガルダ、またはガルーダの別名とのこと。
また、機体のデザインは、僕のイメージする迦楼羅でもあったりする。まあ、空想上の神の鳥なので、想像・イメージするのは自由なのかなー(笑)
最後に後輩に向けて
デザインに関しては、周りの目を引くようにこだわった。ただ機能が優れているだけでは面白くないからね。
精研のコミュニティの中(特にエコラン同期)では、"カッコイイもの"は正義であったし、とにかくカッコイイデザインにすることは共通の意識だった。
車のボディラインがキレイだとかキレイでないとか、きっとみんな答えが重なるだろう。
理由は簡単、そのラインが自然に流れているか?走らせたときの空気の流れを感じるわけだ。
ロボットでも同じように動かしたときの負荷の加わり方をイメージして、工学的に優れた設計をして欲しい。
また、何度もスケッチラインを変えて気に入るまで時間をかけて設計して欲しい。
そして、丁寧に作り上げて欲しい。そうすればきっと、機能美として、"美しい"、"カッコイイ"ロボットができるはず!
僕はなによりカッコイイロボットが見たいです(笑)ぜひぜひみなさん頑張って下さい。

|