|


セントカルラver.2013
全長 712[mm]
全幅 250[mm]
全高 328[mm]
重量 3490[g]
腕機構 ロッドアーム(てこクランク機構) 380モータ×3 最終減速比300:1
ウォームギア使用
脚機構 120°位相ヘッケンリンク機構 380モータ各1 最終減速比30.24:1
ステアリング機構 フロント:サーボモータMG9959×1(リンク機構) リア:MG959×2
サスペンション機構 フロント:ダブルウィシュボーン式 リア:ピボット式
制御 mbedマイコン(チャンネルミキシング、サーボ制御、転倒復帰用モーション、LED)
センサ アーム用ポテンショメータ、3軸加速度、3軸ジャイロ、Bluetooth
大会参加結果
第19回かわさきロボット競技大会出場
決勝トーナメント出場
決勝トーナメント第1回戦敗退
ユニーク賞受賞
KHK杯2012出場
第20回かわさきロボット競技大会出場
予選トーナメント敗退
コンセプトデザインは"いかにハイスペックを詰め込めるか"
今年は、センサ周りに改良を加えました。アーム用にポテンショメータ。
走行性能を評価するために3軸加速度とジャイロセンサ、データ送信用にUSB Bluetoothドングルを搭載。
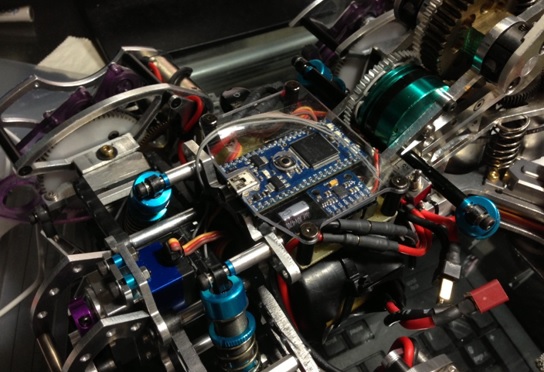
セントカルラに実装されているモータの個数はサーボモータも含めると10個。
多くのモータを制御する必要があるため、制御IC(mbed NXP LPC1768)を搭載。
受信機からの信号をミキシング(マトリックスに289パターン)した後、
指数関数的にモータドライバとサーボモータをそれぞれ速度・位置制御する。
この制御により前後の脚がステアリング動作し、曲線的ななめらかな旋回が可能。
また、それぞれの脚はユニット化しサスペンションが4脚独立に効いているため、
不整地走行における高い走行能力を実現。
アームに関しては、ウォームギアを採用しため非常にコンパクトな減速機・モータユニットとなっている。
特に、スタートと同時に展開するクランクアームは、以下の図のように規定寸法に収まるよう設計されている。
他にも、転倒防止及び落下時の衝撃吸収に役立つ後ろ羽根(アーム部と引きバネによりリンク)を実装。
また、アームと後ろ羽根と後脚を使った転倒復帰モーションも可能。

|