|


エクセリオン
全長 350[mm]
全幅 250[mm]
全高 130[mm]
重量 3300[g]
腕機構 ロッドアーム 380モータ×3 ギア比300:1
脚機構 120度位相スライダーリンク機構
大会参加結果
第19回かわさきロボット競技大会
実機審査会落ち
学術研究発表会
1回戦負け
ロボット名の由来
2つの説がある。
・『トップをねらえ!』に登場する宇宙船から取った名前。
・『魔法少女リリカルなのは』のレイジングハートエクセリオンから取った名前。
どちらであるかは不明。
零-zero- の設計から改造した機体。
設計を早めに終わらせ早めに制作を始め練習を多めに取り、かわロボがどのようなものかつかむと考えながら設計をした結果
ギアの個数など設計の段階からのミスが多く、ほぼ完成してからそのミスに気がついたため、実際に完成したのは実機審査会の当日でした。
設計時に計算されていた重量をはるかに超え一度できた時の重量は3.8kgでした。

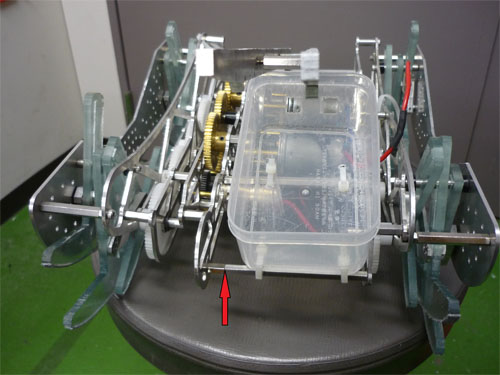
クランクがたわんで引っかかりほんの少ししか歩けなかったため学術研究発表会でカムクランクを導入。
脚の大きさが転倒型でない場合の最大の大きさで設計しましたが、グリップ力が無かったからか、遅く感じました。
今のところ動いていますが理論をきちんと理解していないため研究の必要があります。
アルミでできている三角の部品が小さすぎて、時折脚がクランクからすっぽ抜けることがありました。
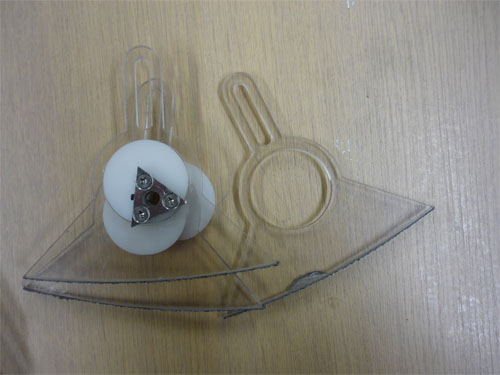
学術研究発表会で回転アームと対戦真ん中に通していた長いスペーサーが折れてしまいました。(下の写真の矢印で示してある所にある通りスペーサーを継ぎ接ぎしたため折れただけです。)
スペーサーを3点止めを意識し過ぎた結果回転アームのような強烈な負荷がかかると簡単に曲がってしまいましたが予備部品があればすぐに交換出来たはずです。
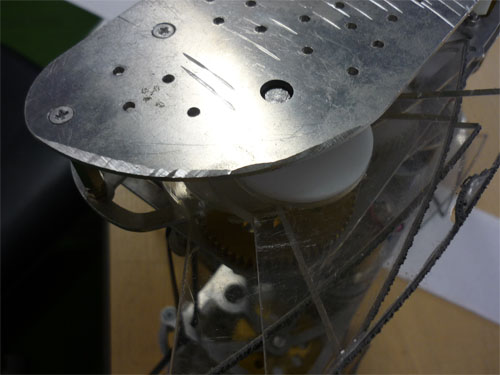
↑回転アームにやられ面取りされたフレームと一部がめくれ上がったPCt5の脚 回転アーム凄すぎ( ´゚д゚`)
・反省点
設計段階からのミスが多い。
六角ボルトを使用できる部分でも皿ネジを使用した結果、整備しづらい機体になってしまった。
足の軸をアルミの1000番系を使用した結果加工時Dカットはやりやすいが、ピンを圧入する際に軸が曲がってしまった。
実際は実機審査会ギリギリで軸を手加工でロボットに付いたまま切ったため負荷がかかり曲がったり、ピンを圧入する際に軸を殴っていただけでした。
力がかかる部分にポリエステルのギアを使ったためイモネジが外れた。
学術研究発表会で黄銅のギアを使用したがイモネジが外れやすかった。
伝送関連を入れる部分がなかった。
真ん中のスペーサーが長すぎハの字に曲がってしまっていた。
来年は
・設計にもっと時間を割く。
・伝送入れを作る。
・脚のギア比を下げる。
・脚につけるゴムを色々試す。
・設計段階でどのようなネジを使用するか決める。
・足のギアと軸は平行ピンではなくスプリングピン等外れるものを使用する。
・スペーサー以外の固定法を模索する。
・外側のフレームも肉抜きしておく。
・棒材を丸棒以外を使用しそもそもピンやスプリングピン等を使用しない。
のようなことに注意して設計しようと考えています。
|