|

fai
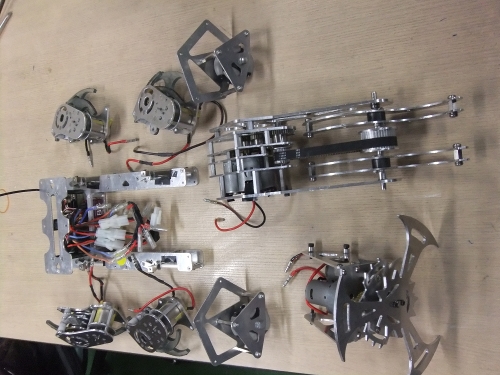
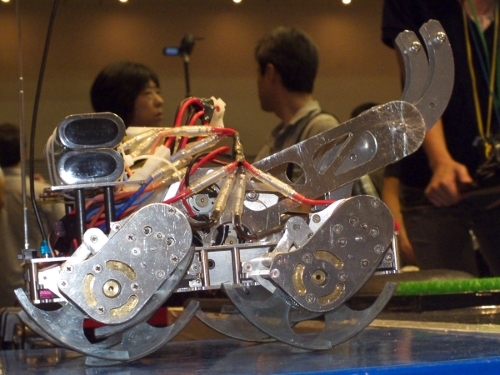
重量 3475[g](最重装備バッテリ14.4V,アームB円形ブレード時)
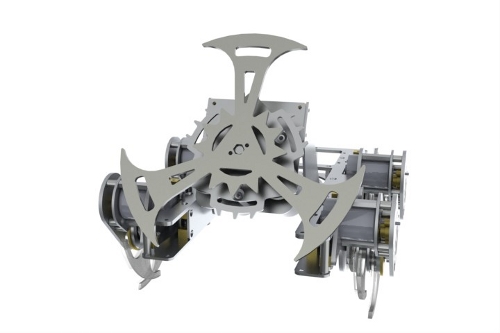
脚機構 ヘッケンリンク3枚脚×4
脚機構用モータ マブチ380モータ(RS-380PH)×4
腕機構 換装式,A:ブレード回転アーム,B:横回転アーム
腕機構モータ マブチ380モータ(RS-380PH)×3,B:タミヤギヤードモータ380K×3
大会参加結果
第18回かわさきロボット競技大会 予選トーナメント第4回戦敗退 敗者復活戦第4回戦敗退
KHK杯2011 トーナメント第1回戦敗退
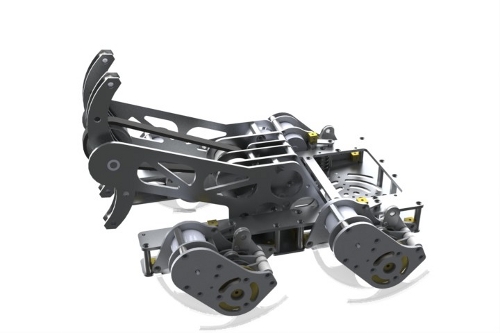
コンセプトは「小型・高機動」「かわロボ用カスタムロボ」。
コンセプトの通りフレーム・脚・アームがそれぞれ独立しており,取り付け取り外しが可能。
それゆえ,それぞれを複数個作成しておくことで故障時の対応が簡易でかつ,
複数種類のアームを製作しておくことで相手によって戦闘スタイルを変えることが可能。
という設計者の趣味通りのカスタムロボ仕様。
脚は4つそれぞれが独立しており,4つのモータを用いた力強い歩行ができる。
また,脚の歯車列には,380用のギアボックスから取り出した2段歯車を使い,少ない歯車の数で減速している。
脚のユニットは結構薄くできたと思っている。
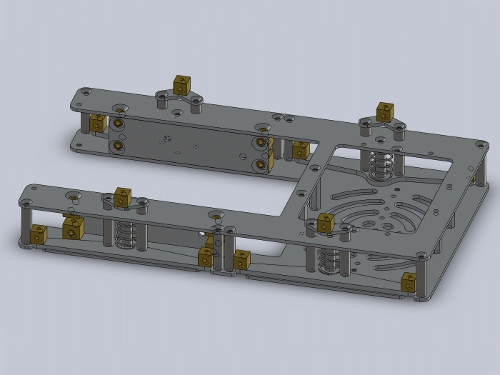
段差対策と,脚の保護のために,それぞれの脚の取り付け部にサスペンションが仕込んである。
脚が壊れたらオムニホイールに換装できるように用意してある。
アームは普通の縦回転ブレード回転アームのアームAと横回転アームのアームB。
両方モータは3つ。
アームAの軸はすべてベアリングで受けていたりする。
全ての歯車が金属製(真鍮orステンレス)かつ,密度が高いので結構頑丈。
バッテリを14.4V載せると速すぎて操縦が難しくなる。というか無理。
止まってる状態から全速で発進しようとするとバック転する。
余談だが,電源を切った状態でひっくり返して前脚を手で回すと,発電して後脚が回る。
|