|

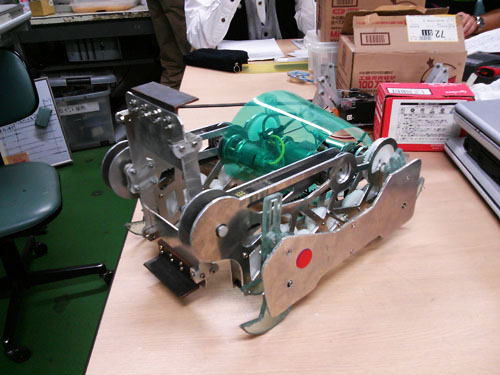
ハヤブサ
全長 約346[mm]
全幅 約248[mm]
全高 約220[mm]
重量 約3300[g]
腕機構 回転アーム
脚機構 スライダークランク機構
大会参加結果
第19回かわさきロボット競技大会出場
実機審査会からのスタート
予選トーナメント本選
第1回戦 房騒さん 敗北
予選トーナメント敗者復活戦
第1回戦 根生 裂片妖 怨恨 勝利
第2回戦 不戦勝
第3回戦 トライスターVI 敗北
(不先勝が二回ほどあったと思うのだが…、かなり曖昧です)
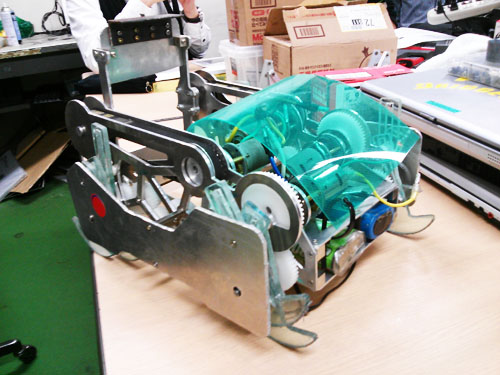
足にモーター2つ、アームにも2つの計4つのアームを使用している。
バッテリーは二本使用。
アームは1対10の割合でギアBOXを使用し減速。ベルトで伝達し、アーム先端の重りの運動エネルギーで相手を倒すことをコンセプトとして設計している。しかし、後述の足の問題などにより相手にしっかりと当てたことがほぼないため、能力は未知数である(こう書くとかっこいい感じがするが、実際はたいしたことはない)。
また、アームの軸付近にスペーサーを使用しなかったために、アームを回すとフレームがたわむ。
ギアはすべてポリアセタールを使用。
足のギアBOXの軸に、いもネジを使用しギアを固定したのだが、ポリアセタールのギアではいもネジを強く締め付けるとギアが歪み、また負荷がかかるところだったので、すぐに空回り(個人的推測)。そのため、動かすための足を動かすのが怖かった。
結果、本選ではリング入場と同時に動かなくなってしまった。
敗者復活戦では、いもネジ部分と軸に某アロンアルファ接着剤を流し込み対応した。そのおかげで、もうギアを外したくても外せない。
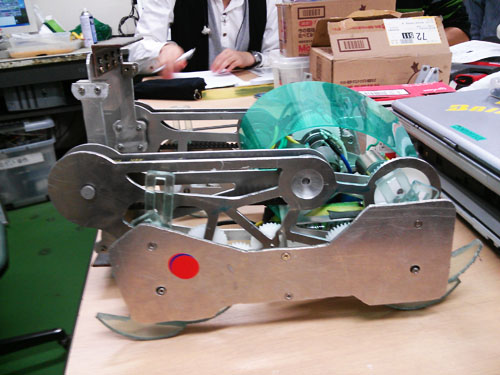
設計者(私)のミスでクランクの中心点がずれている。
足の接地面の曲線の設計の知識が不十分だったため、歩くとガタガタする。たまにジャンプまでしちゃうゾ☆・・・まあ、そのおかげで障害物はあんまり苦ではなかった。
こうして書くと、いいところがないなぁ・・・。
今回、初めての設計andかわロボ参加という貴重な体験ができました。
ロボット関係のことをやってみたくて大学生になった身ですので、とても楽しかったです。
今回の経験をもとに、来年はしっかりとガシガシ動く機体を目指します。
最後になりますが、班員のみなさん、ありがとうございました。朝、早く来いとか言ってごめんなさい。そして、その俺が遅刻しても寛大だったM君、本当にすいません。
また、諸先輩方、ありがとうございました。作業を中断してまで自分の質問に答えてもらったり、さまざまなアドバイス等々、感謝に堪えません。この場をお借りしてお礼申し上げます。
|