|

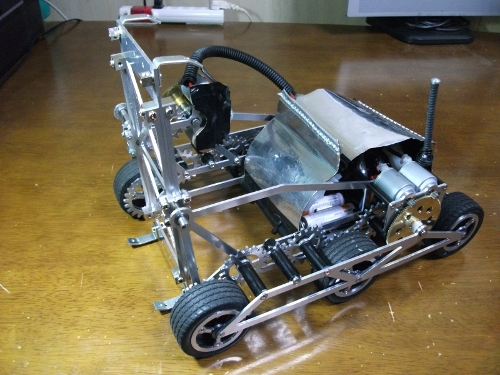
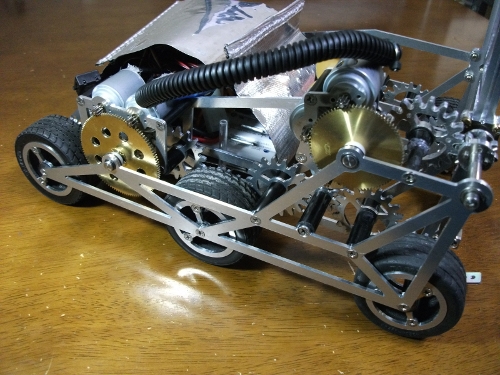
メゴドント
全長 295[mm]
全幅 200[mm]
全高 206[mm]
重量 1495[g]
大会参加結果
第12回BRAVE 前半トーナメント1回戦敗退
後半トーナメント3回戦敗退
トライアル最高記録37秒
BRAVE用に製作した初めての機体。かわロボをベースに手堅く設計した。
腕には縦回転アームを採用。運動エネルギーで相手を弾き飛ばす設計にしたが、重量の見積もりが甘かった為アーム重量を予定通りに稼げず攻撃力が低くなってしまった。
また、回転数が最大に達するまでの時間が長く、操縦も困難だった。
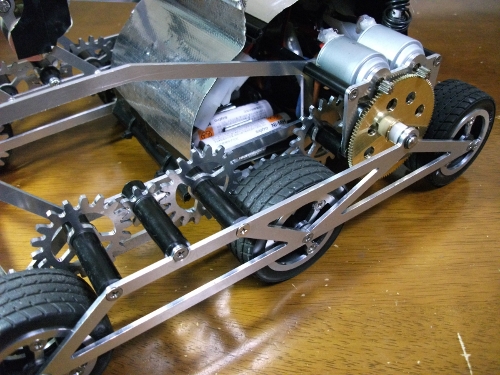
脚回りは第9、10回大会上位入賞者を参考にしてホイールを自作し、ギヤと一体化している。
モジュール2のギヤは試験的に自作したものを使用している。転位を負方向に大きく取ったため、低効率ではあるが動作は確実だった。
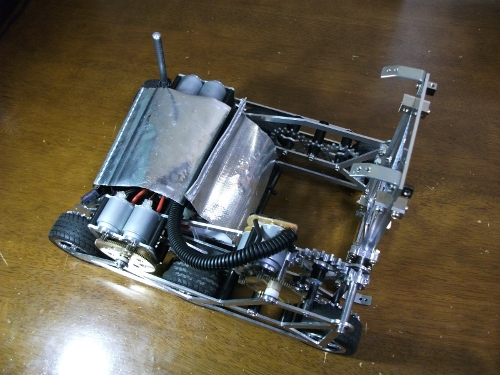
モータは腕、脚共にタミヤ遊星ギヤボックスセットに同梱されているRC-260RAを使用。端子部分が異常に細く、作業中何度も折ってしまった。さらに、RS-380PHの様なねじ穴も付いていない為、固定に難儀した。
当初はラジコン用のNi-MHバッテリを使用するつもりだったが重量の問題からエネループを使用。もう少し時間があればLi-Feバッテリ等をきちんと吟味し搭載したかった。
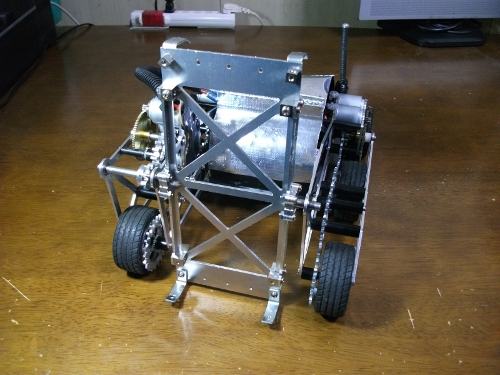
大会では、何箇所かねじが緩む以外大きな故障は無く高い耐久性を示した。しかし、他の機体は樹脂でも十分な耐久性を持っており、剛性に関しては過剰設計だった。
また、タイヤは6輪全てが接地しており旋回性が低くなっている。タイヤの接地方法を工夫すれば、旋回性を向上させることが可能。
次回は樹脂製の部品を多用し、回転アームに重量を充てられる様改良したい。
なお、機体名は製作中に読んでいたパオロ・バチガルピの著作に登場する生物より拝借した。

|