|

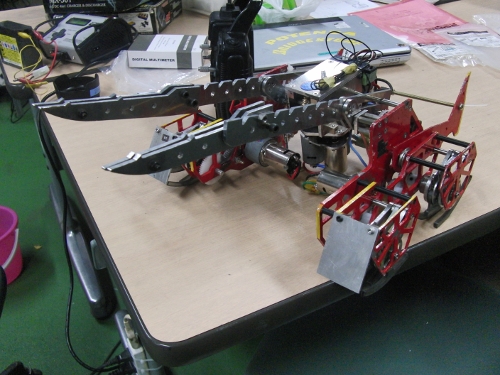
SK-Ⅱ+Ⅰ
全長 310[mm]
全幅 235[mm]
全高 250[mm](アーム軌跡最高点の場合)
重量 3400[g]
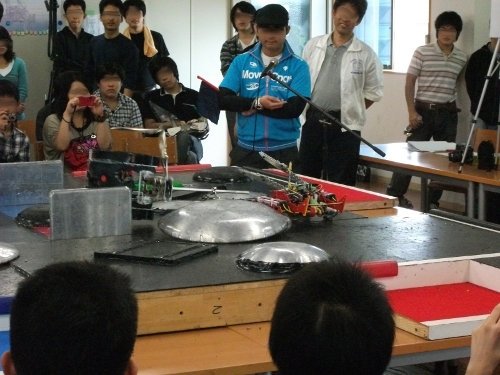
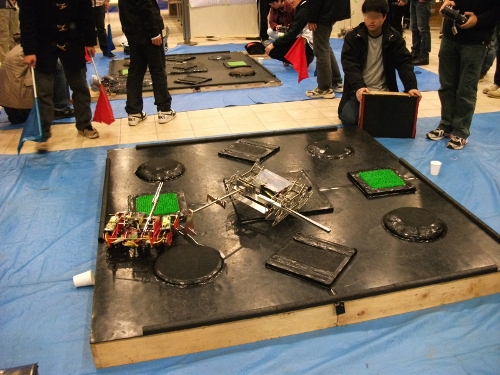
大会参加結果
第18回かわさきロボット競技大会 予選トーナメント1回戦敗退
KHK杯2011 トーナメント2回戦敗退
ロボット名の由来
⇒製作メンバーのイニシャルから取った.(決して某化粧品名ではない)
また,第16回かわさきロボット競技大会に参加した「SK-Ⅱ」のリベンジ機体でもある.
脚機構:3枚(120度位相)のヘッケンリンク.
材料は,ポリカーボネート(5mm)を使用.
腕機構:(元は)片側に2枚のアームブレードを駆動させるスライダークランク.
材料は,A2017(4mm)を使用.
機構に関しては,至ってオーソドックスなロボットとなる.
脚は,4組でステアリング機構がないため,前進・後退・旋回のみの移動となる.
脚に使うモータは,片側2組の脚にタミヤギヤードモータ380シリーズを1個使用.
ギヤ比は平歯車を用いて約45:1にした.
腕は,当初,平行リンク機構を採用しようとしたが,
設計当時の自分にとっては複雑になってしまい,
あえなく,脚機構でも良く用いられるスライダーリンク機構を採用.
また,アームブレードが長いためにモーメントの問題により,出力トルクを上げることが必須となった.
その結果,用いたのがウォームギヤとウォームホイールの採用である.
ギヤ比は平歯車とウォームギヤを組み合わせ,210:1にした.
ただ,ウォームギヤは平歯車と違い,入力軸と出力軸が垂直になっているので
歯を噛み合せるのは設計図上では出来ていても現実は大変だった.
腕に使うモータは,マブチモータ380 RS-380PHを3個使用.
前身の「SK-Ⅱ」は,転倒型でスタート時に苦い思い出があったため,
今回は規定サイズに入り,直ぐに発進できる小型のロボットにした.
大会は,上記の通り,自身の設計&操縦の未熟さもあり,散々な結果となった.
ただ,反省点も多く見つかって次に活かす原動力となったのは間違いない.
反省点
○小型化を目指したため,「Links」を用いて小さく設計してしまったが,
やはり,クランク半径は最小限に脚は最大限の大きさにした方が良い.
○電装系の位置を見映えも含め,もう少し考慮するべきであった.
○電装系のケーブル類がアキバの安物の細い物を購入したので大電流が流れるとすぐに発火したため,
太いものを使用するべき.
○ギヤと回転軸の接続にセットカラー,スリットカラーを用いたが,Dカットしていても外れてしまったり,
六角ボルトが潰れて外せなかったりと思った以上に使用に不便であった.
○持ち運びを重視して,手で掴めるところが欲しい.
○モジュール化を目指したものの機構と機構をつなぐ要素がスペーサばかりで数が少ないのもあって,
動く際にガタがいろいろあった.接続方法をキチンと考えたい.
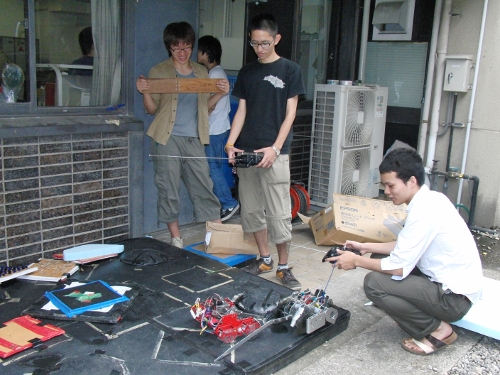
将来,ロボット開発の職に就きたい自分にとっては良い経験にもなり,
同じチームの今村君,鋤柄さん,久保田さんにも凄くお世話になったので,
この場を借りて感謝の意を伝えたい.
本当にありがとうございました.

|