|

二三式 鈴鈴王
スペック
全長 350[mm]
全幅 346[mm]
全高 200[mm]
重量 3470[g]
腕機構
シールドアーム(揺動スライダリンク)
足機構
ヘッケンリンク(120度位層)
大会参加結果
第21回かわさきロボット競技大会
予選トーナメント
第1試合 K314 38式 勝利
第2試合 BFL-1 勝利
第3試合 VRC-MT05 勝利
決勝トーナメント
第1試合 ネオ・サトラレン V7 勝利
第2試合 稲 concon 敗北
他,KHK杯出場
機体概要
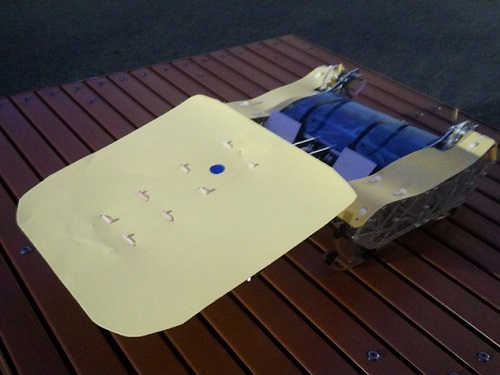
走破性の高い大きな足と機能部品を詰め込むための十分なスペースを求めた結果大型の機体となった.スタート時は立てておき転倒して戦闘開始する.前年の機体のようにアームユニットまるごと換装はできないが,アームの付け根部分で付け替えが可能な構造になっている.
機体名は設計者名から.
機体解説詳細
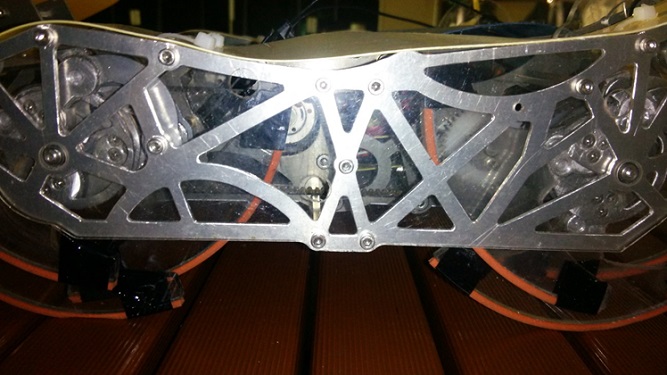
本体は2枚のアルミ板を長いスペーサで組み合わせ,周りを適当にアルミ板で構成していく構造.2つの板を繋ぐスペーサはこの長さのものは販売していないので製作した.精度が問題になるかと思われたが,そんなことはなかったぜ.
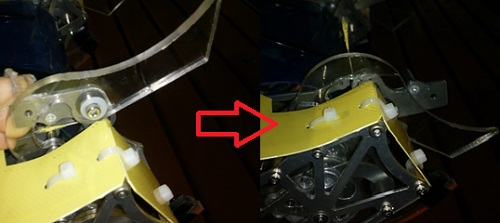
また転倒機構として倒立を支持する部分がスライダクランク機構となっている.
当初は電装周りの配置が雑然としていて手を加えにくかったので電装ボックスを作ることで整理した.
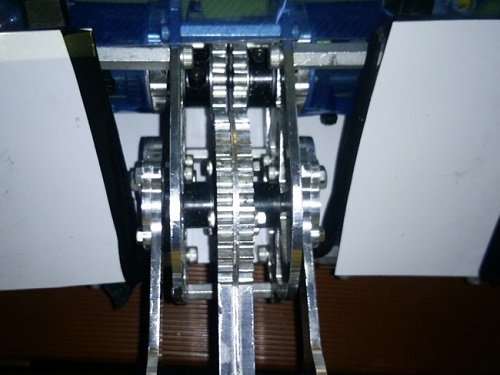
脚の動力は左右モータ各1個ずつで歯車で減速後にベルトによって伝達する.減速比は36:1ほど.さらにプーリから脚に直接動力を伝達している.プーリは片持ちで軸受けはオイレスである.このためにベルトのテンションで軸が傾きやすいという欠点がある. 代わりに整備性は悪くない.
脚機構はかわロボでは一般的なヘッケンリンク.スライダリンクに比べて脚先の軌跡を円に近づけやすい.この機体の脚は初期型と後期型があり,本大会では初期型,KHK杯では後期型を採用した
初期型は脚先軌跡を円に近づけており,走破性が高いが代わりにリンク節に負荷のかかる構造をしている.ずばり言うとずっごいひっかかる.脚の形は左右非対称であり,これは脚を大きく設計した結果,スペーサと干渉しやすくなったことを防ぐためである. また,脚先はアルミ板を付けて足幅を水増ししている(当初は脚の材料が厚さ7mmだった名残).脚のパーツはリベットによって組み合わせられているため半永久的に外れない.
後期型は初期型にリンク節に負荷がかかり脚の運動が止まる(すなわち死点に入る)ことがしばしば発生したため,コンロッドを2mm伸ばし余裕をとった.また,もう1つの初期型の欠点としてトルク不足により旋回時に障害物に引っかかりやすいという問題があり,コレに対しては脚自体を小型化し,必要なトルクを小さくすることで対応している.代償として初期型より走行速度が低下した.
腕部の動力は向かい合わせのモータ1個ずつから歯車に力を伝達し,結合された歯車によって双方の歯車を受け動力を伝達アーム機構に伝達している.減速比は523:1.
アーム機構は揺動スライダリンクのスライダ部分をクランクの内側に入れることにより可動する角度を大きく確保している.アームの付け根部分は三点のネジ止めであり,棒状アームとシールドアームを取り付けることが可能.
本大会ではシールドアームで出場.シールドアームは攻撃より防御を重視した結果先っぽが柔らかなる盾となっている.相手の攻撃は弾きやすいが代わりに自分も攻撃しずらい.
前年とは設計が大幅に違う大型機ということもあって設計は困難な点が多かったが無事完成して安心した.初期型の脚にはだいぶ調整に手間取ったがその分脚に対する愛着は強くなった.
反省点として初期の設計思想ではかわロボで強い機体をコピーしてそこに自分なりのアクセントを加えるものであったが,いつの間にか個性は倒立支持機構だけとなっていた.
最後にこの機体を信じ操縦してくれたドライバー,無茶な注文に文句を言いながら加工してくれた加工者,記事を書かないと晒し上げすると脅してくださったロボ班長,そしてこの機体製作に関係している全ての方々に感謝を捧げます.本当にありがとうございました!
|