|

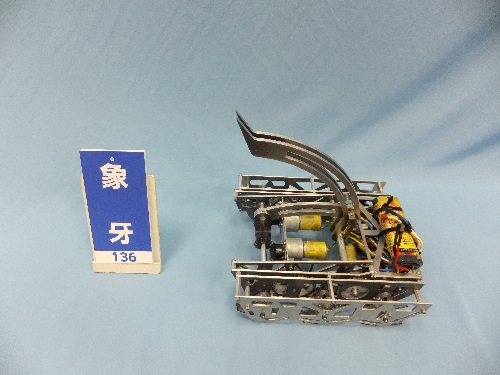
象牙
縦 380[mm]
幅 350[mm]
奥行き 250[mm]
腕機構 4節リンク機構
380モータ2つを使用
最終減速比 300 : 1
脚機構 スライダーリンク機構
120度位相×3枚×6脚
大会参加結果
第21回かわさきロボット競技大会
B予選落ち
KHK杯,ヤガボット,バトルロボット大会in東京工科大学 - 2014
名前の由来
象のような丈夫な体と強力な牙のようなアームをもつところから象牙と名づけていますが,アームの形と6足なところを見ると,「象」というより,「ゾウカブト」ですね(笑).
ロボットの概要
設計希望者がおらず,急遽空飛ぶシリーズの方に設計をお願いした機体です.
やや総重量が大きく.6足なので安定感があります.またアームの可動範囲が広いためひっくり返されても自分で復帰することができます.
反省点としては,歯車の噛み合いが悪かったり,脚の軸に不備があるのが原因で,機動力に乏しいところです.またアームが短めなので,かなり間合いを詰めないと,届かない,機体の底が低いので高い障害物に引っかかり,乗り上げるリスクがあるという点も問題があります.
次回作を作る際は,機動力に重点を置き,設計し,製作したいと思います.かわさきロボットにおいて機動力は勝利するための必要条件だと思いますので.また障害物対策で底もやや高めにしつつ,強力なアームを考案できたらいいと考えています.
|