|


部分分数分解
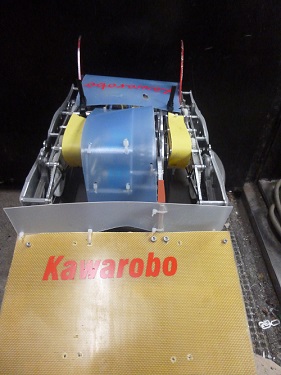
全長 350[mm]
全幅 250[mm]
全高 450[mm]
重量 3450[g]
腕機構 シールドスライダークランクアーム 380モータ×4 最終ギア比200:1
脚機構 120度位相ヘッケンカム機構380モータ×2 最終ギヤ比40:1
大会参加結果
ROBOT WARS 2014 in 未来館
第1試合 薔薇輝 負
第21回かわさきロボット競技大会
予選トーナメント
第1試合 SIT 勝
第2試合 稲CONCON 負
予選トーナメント敗者復活戦
第1試合 14式 飛燕 負
KHK杯2014,ヤガボット,バトルロボット大会in東京工科大学 - 2014,白門祭部内戦,ROBOTWARS葛飾,立命杯,学発出場
ロボット名の由来
班員の妹が勢いで決めました.
響きがいい感じ.
今年も学祭周りなど外に行く機会を増やしたいと考えていたので,
運びやすい中型機になりました.
脚について
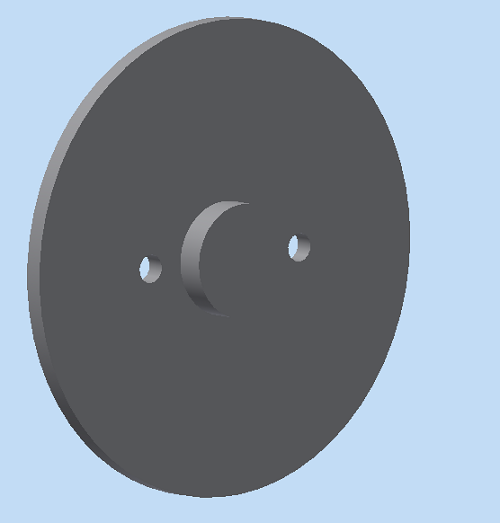
去年,一昨年と続けてきたカムからの反省を活かし,カムをより小さくするために 2点止めにしました.
かなり試合をしましたが未だにネジが緩んだりなどはありません.
m3ナット&赤ネジロックのおかげ.
カムの材質がPOMであることもあり,締め付け具合で厚みが変わってしまいますが,
去年よりカムが小さくなったことでより円軌跡に近づきました.
緑の長さを短くすれば,円軌道に近づけるが強度面を考えこの形になりました.
ポリカ3t2枚をリベット締結しており,ヘッケンリンクにしてはレバー周りが丈夫です.

本大会では脚ゴムがほぼ剥げており,山が登れませんでした.
その後シリコンシーラントを手塗りしたら,問題無く登れるようになりましたが,
手塗り特有の凹凸から裂けてしまいました.
一日は持つので問題ありませんが,最近流行りの脚の型を試したいです.
シリコンを塗ると横にはみ出して
カムクランク特有の脚同士がすり合う際の抵抗になってしまいますが,
シリコンを塗る前にはんだ用のフラックスを塗っておけば,
剥離剤となり,手でペリペリ剥がれてくれます.
脚周りの駆動系について.
初め,ギヤはモジュール1t3アルミ,軸受けがオイレスでしたが,
効率が悪かったのでギヤをt5POM,軸受けをボールベアリングに.
その結果乾電池駆動はもちろん,”一応”手で押して動くようになりました.
ギヤにリチウムグリスを塗ったら更に動きが良くはなりましたが,
コートから出るゴミがギヤに付着し,整備が面倒になってしまいました.
省スペース化のためにギヤボックスにピンを通しギヤにピンが埋め込まれるようにしたが,
ギヤボックスに穴を開けた際中心からずれたため偏心してしまっており,
回転数が高い脚周りでは致命的で脚周りが効率の悪い要因の一つとなってしまっています.
天羽々斬などで採用されたDカット穴を試す予定です.
アームについて.
去年の機体でギヤボックスが壊れてしまったのでギヤボックスを卒業し,自作ギヤボックスを採用しました.
空飛ぶパンケーキタートルで採用されていたt10のアルミから2段ギヤを作りました.


ロボットウォーズあたりでギヤがかけ始め,大会の日にはトルクが大幅に落ち,
相手を持ちあげられなくなってしまいました.
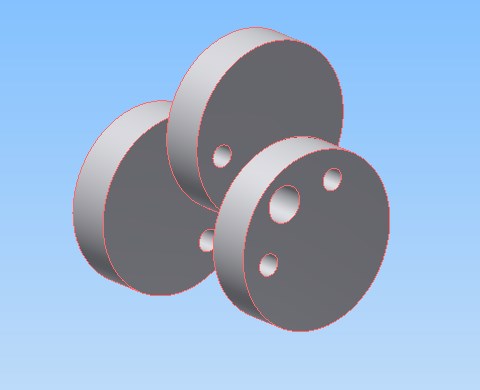
大会後,モジュールを1から2に上げ,モータの数を3個から4個,ギヤ比を約1.5倍の200:1に変更しました.
またギヤが一部欠けてもすぐに交換出来るようにt5アルミギヤを2つ作りピンで固定する方針に.

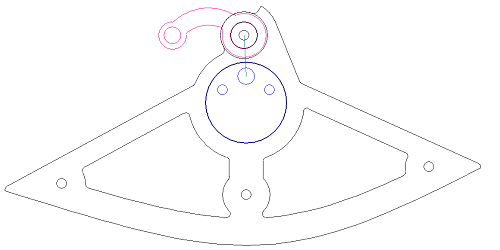
初段のモジュール0.5の市販ギヤは下図のような治具を作りギヤに嵌め,
ポンチを打った後外し丁寧に穴あけをし,
自作ギヤと一緒に軸に嵌めた後,リベットで締結しました.

ピン打ちよりリベット締結の方が精度が出る気がしましたが,
初段以外ではトルクに耐えられず折れると考え前述のピン打ちになっています.
スライダーリンクのクランク半径をスライダー軸より内側に入れることにより稼働域を確保しています.
スライダーに持たせた余裕とシールドが曲がりやすいこともあり,
下からアームが入りやすいのでスライダー溝をもっとせめ,シールドをCFRPからポリカーボネートにしたいところです.
最後に
皆もっと試合しようぜ!!


|