|

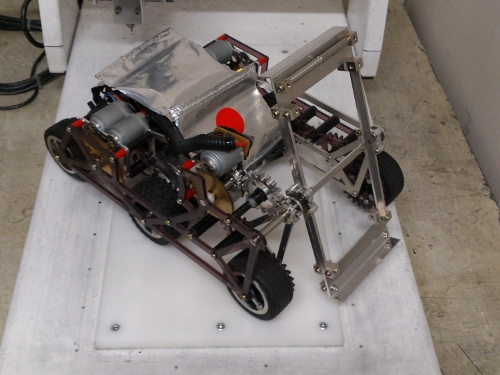
改良メゴドント
全長 290[mm]
全幅 208[mm]
全高 208[mm]
重量 1490[g]
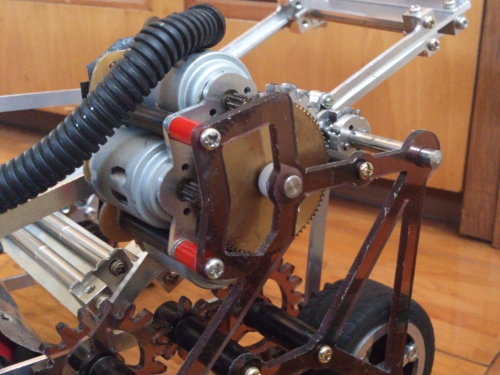
腕機構 シールド縦回転アーム 260モータ3個 最終減速比10.5:1
脚機構 タイヤ 260モータ片側2個計4個 最終減速比39.5:1
大会参加結果
第13回BRAVE出場
トライアル最高記録20秒
前半戦トーナメント第3回戦敗退
後半戦トーナメント第1回戦敗退
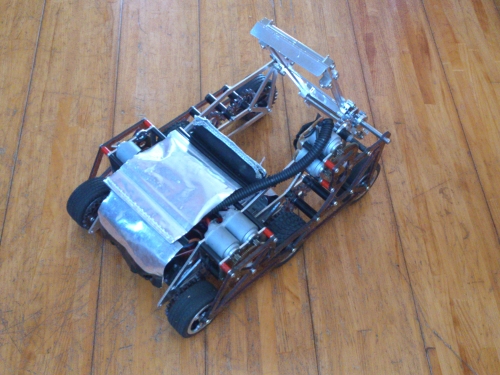
前回の反省を生かし、機動力の向上とアーム以外の軽量化を図ったメゴドントの修正設計機体。
第19回かわロボ終了後に修正設計と製作を行った為、部品の2/3を取り替える程度の改良しかできなかった。
前回はタイヤ6輪全てが接地しており旋回が遅かったが、後ろ側4輪のみ接地させることにより旋回速度を向上させた。
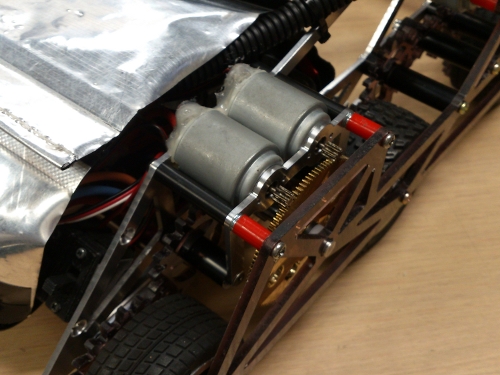
軽量化の為ギヤと外側のフレームを厚さ3[mm]のポリカーボネート製に換装し軽量化を図った。
さらに、外側のフレームはギヤの軸をたわませない様にねじ穴を追加した。
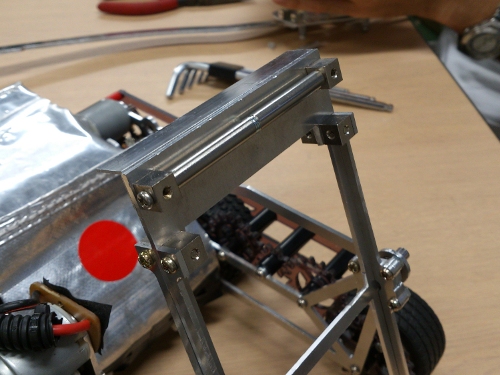
アーム本体も無駄な支柱(ばってん部分)を無くし先端に重量を集めた。
これらの工夫により50[g]程度軽量になりアームの攻撃力を高めることが出来たものの、アーム強度が低下し大会本番で破損してしまった。
前回見出した課題はおおまかに修正できたが、Li-Feバッテリの搭載は間に合わなかった。
なお、脚回りは前回と変わらず高い信頼性を示した。
BRAVEは重量制限が厳しいので、アーム重量を増加させるよりモータ出力を強化し運動エネルギーを稼ぐべきだった。
さらに、障害物と接触しないように形状を工夫すべきだった。
復帰できないのも大きな失点に繋がっていた。
次回は根本的に設計を改良し、是非とも優勝したい。


|