|


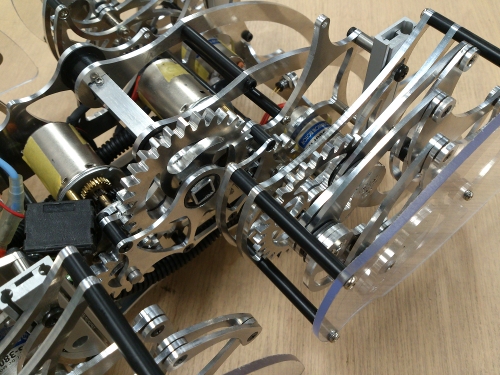
テロートヤンセン
全長 347[mm]
全幅 250[mm]
全高 152[mm]
重量 3470[g]
腕機構 ロッドアーム(ショートロッド) 380モータ2個 最終減速比620.01:1
脚機構 テオ・ヤンセンリンク機構 380モータ各1個計4個 最終減速比46.5:1
大会参加結果
第19回かわさきロボット競技大会出場
予選トーナメント本戦第3回戦敗退
第1回戦 うぃんとみる 勝利
第3回戦 スパイク F type-R 敗北
予選トーナメント敗者復活戦第4回戦敗退
第3回戦 戦乙女 Grimgerde 勝利
第4回戦 八神皇 敗北
特別戦出場チーム賞受賞
KHK杯2012出場予定
昨年製作したテレヤンセンの反省を生かし、大幅な改良設計を行った機体。
動くのがやっとだった昨年とは異なり、予選トーナメントでは充分な機動力と攻撃力、剛性を証明することができた。
昨年のテレヤンセンは、巨大な脚とそれに伴う重量の増加、剛性の低下が大きな問題となり実機審査会中に故障した。
そこで、今年は走破性を損なうことなく脚の小型軽量化を成功させる必要があった。その為の主な改良点は4点存在する。
1つ目はリンクの比率変更による脚全体の小型化である。
かわロボでは大型の障害物を乗り越えられる脚構造が必要となる。
一般的なヘッケンリンクやスライダクランクを用いた脚機構は一部が円運動に近似できる軌跡を描く為、障害物を乗り越える際は脚の振り上げに加えてタイヤと同等の登坂能力を発揮することが出来る。
対してテオ・ヤンセンリンクは軌跡の一部を直線に近似できることが本来の長所であり、平らな地面において最大の効率を発揮する。その為脚の振り上げは小さくタイヤの様な登坂能力は持たない。
前回は登坂能力の低さを脚の振り上げ高さで補っていたが、振り上げ高さを増加させる為には脚軌跡全体を大きくする必要があり、結果脚そのものが大型化してしまった。
また、脚の振り上げ最高点は地面から42[mm]であり充分すぎる高さだったが、平均的な振り上げ高さは小さく軌跡が歪だった。
今回は脚の振り上げ高さを見直し、最低限必要な高さのみ振り上げるように改良した。それに伴い、振り上げ最高点の高さより平均的な振り上げ高さを重視し、滑らかな軌跡を構築した。
これらの設計変更により大型化は抑制され、思案点も回避することが出来た。
2つ目は構造の簡略化、省パーツ化である。
昨年の脚構造は剛性こそ高かったものの、厚さ2[mm]の板を5層も積み重ねていた為横幅は大きく、パーツの種類と総数はかわロボの脚機構としては考えられないほど多かった。
これは大量の対偶を確実に保持する為部品の多くを2枚1組で用いていたことが原因である。
しかし、この保持方法は強度を過剰に向上させるだけだということが判明した為、今回は半分以上の部品を1枚組みで使用している。
3つ目は前後のクランク分割である。
通常、テオ・ヤンセンリンクは前後の脚が両方とも中心のクランクに接続されるため、負荷が集中し高速回転には適さない。
昨年はこれによりクランクが破損したため、今回は前後の脚それぞれに別個のクランクを設けた。
また、本来のテオ・ヤンセンリンクは前脚と後脚は向きが正反対に配置されている為、脚の軌跡で前後で異なり障害物を乗り越える際問題となる。
そこで、前後別クランク化と同時に脚の向きを揃え、前進時に最も障害物を乗り越えやすいように調整した。
4つ目はサスペンションの搭載である。
脚への負荷を抑えるための措置だが、一般的なサスペンションと異なり上下にのみ平行移動する機構となっている。
これはテオ・ヤンセンリンクの特異な関節構造により、下り斜面と平面の境目でリンクの一部が床と接触するのを防ぐ為である。
もともとは前後左右独立して可動する設計だったが、あまりにも強度が低かった為最終的に右前脚と右後脚、左前脚と左後脚を一体化してしまった。
そのためこの改良点はあまり生かされていない。
これらテオ・ヤンセンリンクに関する改良以外にも、基礎的な構造も改善されている。
自作ギヤによるギヤとクランクの一体化や軸との接合部を強化する為に角柱を用いるなど、他のかわロボ参加者が用いている技術を積極的にとり入れた。
テオ・ヤンセンリンクの生みの親テオ・ヤンセン氏は、最終的にストランドビーストを自立・自律した生命体にすることを目的とし日々創作を行っている。
現在、ストランドビーストは生殖こそ出来ないもののエネルギーの自給や状況判断といった能力を備え、氏の理想とする生命体に着実に近づきつつある。
しかし、進化の途上にあるストランドビーストは砂浜以外に生存圏を展開することができない。そこで砂浜以外の過酷な地形に生存圏を広げるにはどの様な改善(進化)が必要なのか、自分なりに試行錯誤した結果がテレヤンセンとテロートヤンセンである。
どちらのロボット(?)もテオ・ヤンセン氏が創るストランドビーストとは素材も制御機構も大きく異なり、ストランドビーストと呼ぶには異質である。
しかし、生物の進化に必要不可欠な移動機構の発展、ストランドビーストにおいてはテオ・ヤンセンリンクの改良を、多少なりとも実験・考察することは出来た。
さらに、決勝トーナメントに進むことはかなわなかったが、特別戦出場を果たし昨年の汚名を返上することも出来た。
脚部の曲線は人間の脚を意識してデザインし、振り上げ高さ最高点で膝を折り曲げた姿勢に見える様にした。





|