|

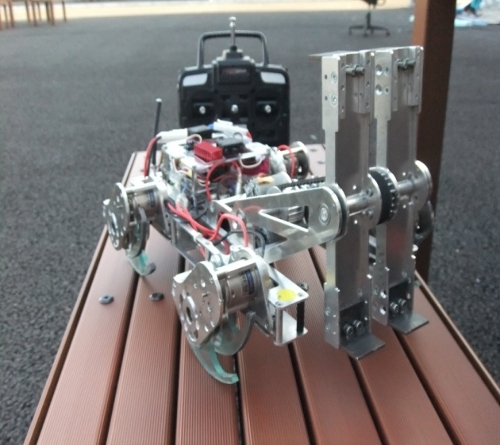
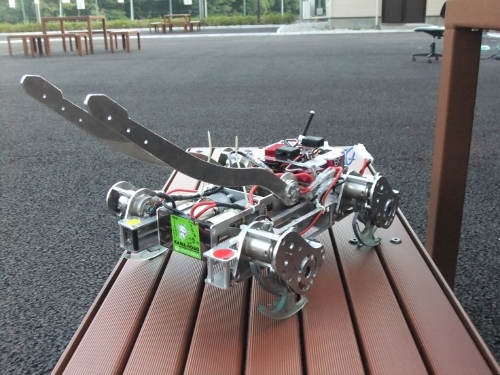
図1、2 fai#機体写真
fai#(ファイ)
全長 装備によって異なる
全幅 248[mm]
全高 装備によって異なる
重量 3495[g]
腕機構 換装式 ロッドアーム
回転アーム
脚機構 ヘッケンリンク機構
大会参加結果
第19回かわさきロボット競技大会出場
予選トーナメント本戦第1回戦敗退
第1回戦 Cumulonimubus 敗北
予選トーナメント敗者復活戦第3回戦敗退
第1回戦 黒姫 HOLIC 勝利
第2回戦 空飛ぶスパゲッティモンスター 勝利
第3回戦 魂魅 裂片妖 敗北 敗北
KHK杯2012出場
ベスト16
第1回戦 (シード)
第2回戦 FRESH! FOOD! STORE! 文化堂 勝利
第3回戦 黒の剣士 勝利
第4回戦 村正 敗北
機体解説
去年のfaiの改良設計機。コンセプトは去年と同様の「小型・高機動」「かわロボ用カスタムロボ」「なんとしてでも試合には出れる機体」。
名前の由来はfaiの改良型なので#を付けた。C→C#のまね。#は発音しない。
換装する機体を作るとかわロボの機体審査のときに換装する組み合わせの回数分機体審査をしなければならないので、
換装する機体を作る人は早めに会場に行きましょう。
faiからの主な改良点を以下に挙げる。
・改良点1
faiのフレームは小さすぎたためにバッテリの搭載位置が高くなってしまってしまい、
段差にさしかかった時や相手との押し合いのとき、機体が傾いた時、
急加速した時などにバランスを崩しやすいという致命的な弱点があったため、
フレームを規定サイズぎりぎりまで大きくすることで、
フレーム内にバッテリの内蔵スペースを確保し、機体の安定性を向上した。
・改良点2
faiのアームは攻撃力が低く、
アームB(横回転)に至っては相手がロッドアームでなければ攻撃に使えない(ただの飾りと化す)といった
かわロボに出るとは思えない2つがそろっていたので、
改良点1にあるようにフレームを作り変えた際に取り付けられるアームのサイズを一回り大きくできるように再設計することで、
アームの機構に使えるスペースに余裕を持たせ前年に比べトルクの十分なアームを設計、製作できた。
・改良点3
フレームの大型化とアーム機構の強化により重量が増えることが予想された為、
設計段階で脚およびフレームのかなりの軽量化を行った。これにより脚とフレームのみの状態ならば、
大型化しているにもかかわらずfaiよりも軽くなっている。
・改良点4
電装系(アンプおよび受信機、ケーブル)も1つのユニットとすることでよりコンセプトに近づいた。
・改良点5
faiのアームで直径2、S45C生地の平行ピンを使っていたところ綺麗にせん断してしまったので、
直径3、S45C焼入れの平行ピンを使ってみた。今のところ折れてはいない。
ユニット解説
・フレーム
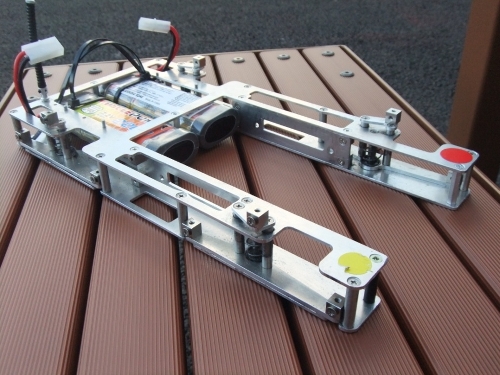
図3 フレーム
去年より一回り大きくなったフレーム。おかげで今年はバッテリを2本内蔵可能。
肉抜きにより軽量化および配線の固定が可能になった。
取り付けられるアームの幅がfaiの90mmから100mmに増えたのでアームの設計が楽になった。
相変わらず4脚独立サスペンション搭載。写真でフレームに貼ってある黄色シールはかわロボの機体審査の際に換装機体に貼られるもの。
・脚
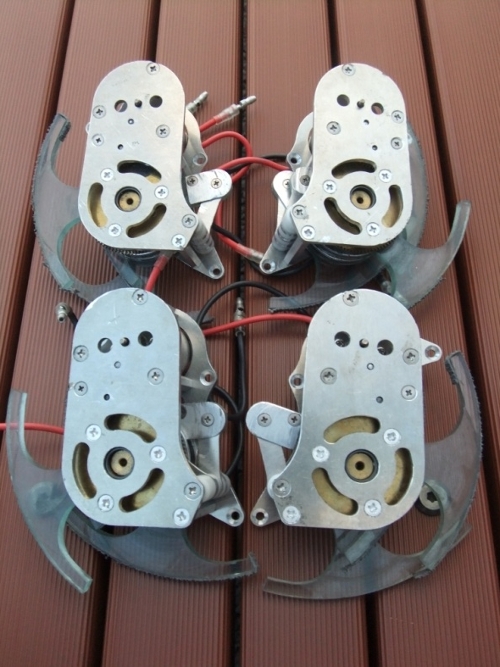
図4 脚1セット
4脚独立。タミヤギヤードモーターのギヤヘッドから取り出した2段ギヤを減速に使うことで少ない歯車で22.5:1まで減速している。
ピニオンはEK1-0352(歯数10)。構造や減速比などは去年と同一だが、去年より軽量化し、かつメンテナンス性も向上させた。
左右3個ずつ作ったので壊されても次の試合には出れる。
それが壊れてもオムニホイールが取り付けられるので、相当なことがない限り試合には出場可能。
換装できる仕様なのに減速に2段ギヤを使っているせいで
1ユニット作るたびにギヤードが1個犠牲になるので量産できないという致命的な弱点を持つ。
よく速すぎると言われるが、速すぎる分には操縦(かプロポ)でどうにかすればいいので、
そもそも速度が出ないよりマシかと思ってる。(去年同じ速度の脚で自滅してるけど気にしない)
・電装系
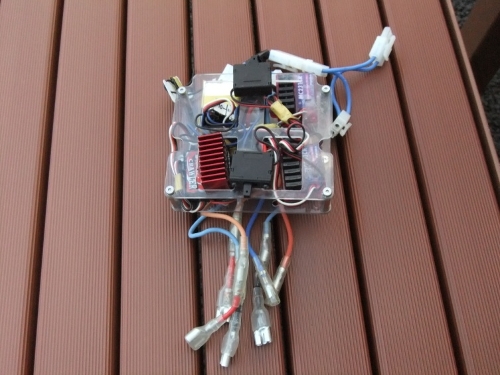
図5 電装ユニット
faiでは電装系はユニット化されていなかったが、今回はユニット化をした。
配線をできるだけ詰め込んだので見た目が汚い。メンテのときにそのまま外せるのは便利。
アームを回すとやたらとノイズが乗ったので受信機をアルミホイルで覆ってみたらマシになった。
製作段階の早いうちに強強度のねじロックで固定したのは失敗だった。
・アーム
換装。ショートロッドアームと回転アームを作った。1[kg]くらいまでの重さのもので、規格があっていれば換装可能。

図6 回転アーム
ブレード回転アームとシールド回転アームの中間のような見た目の中途半端な感じの回転アーム。
モータ3つの出力をモジュール0.5の既製品のギヤから自作のギヤに伝えて減速する。
こっちのアームはfaiの回転アームの設計をほとんど流用しており、細かい改良点はいくつかあるものの、
基本的には自作ギヤを使うことで軽量化し、軽くなった分の重量をアームの先端にのっけたもの。
設計的には軸の中央にベルトの荷重がかかるために軸がたわみやすくなっているので良くない。
横板の外側にプーリを配置すればいいのだが、
換装したときにフレームと干渉しないように設計するとそこそこ重心が高くなるので迷った結果今回は設計し直さなかった。

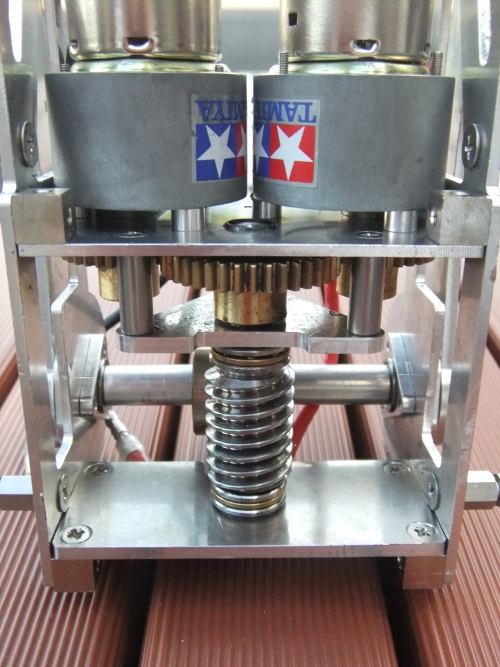
図7、8 ショートロッド
ウォームギヤを使ったシンプルなショートロッド。ギヤード2個の出力をウォームギアでさらに減速する。
そもそもウォームギヤを使ってみたいがために(セントカルラ、SK-Ⅱ+Ⅰと先輩の機体が使っていたのを見て使いたくなった)
こんなつくりのアームが出来上がった。出力は十分だが、少しロッドが短すぎたかもしれない。
ウォームを使ってるので、計量のときにロッドを上げておくのを忘れると急いで指でギアを回す羽目になる。
ウォーム+ベアリングの見た目がかっこいいので気に入っている。
このfai#は換装機であるためアームを取り替えさえすれば
かわロボ以外の何かにも使えるんじゃないかとかいう目論見もあったりするので色々やってみたい。
アームは横幅100[mm]で横からM4のねじ2本が水平に70[mm]間隔で取り付けられるものであれば装備できるので、
なにか面白いアイディアのある方はメモ書きで良いので企画書や設計図等をくれるとありがたいです。
|