|

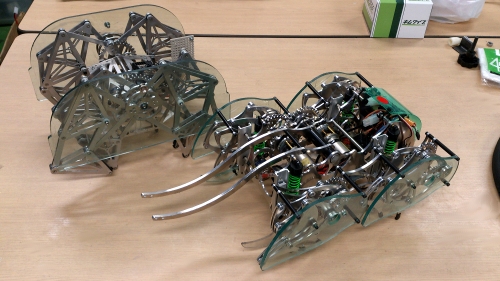
エクステレヤンセン
全長 325[mm]
全幅 220[mm]
全高 208[mm]
重量 2250[g]
腕機構 無し
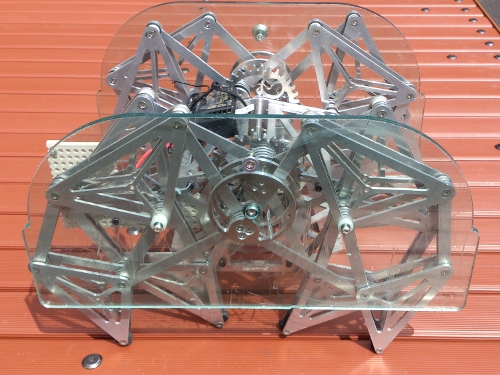
脚機構 テオ・ヤンセンリンク機構 380モータ片側1個ずつ 最終減速比36:1
大会参加結果
無し
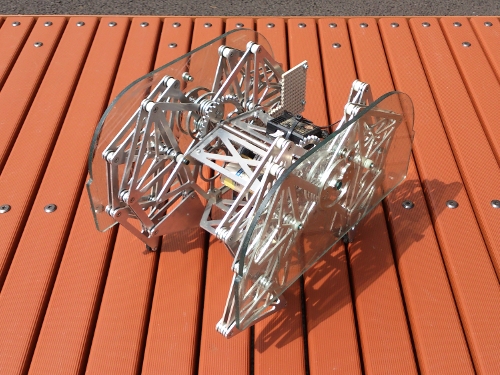
昨年製作したテレヤンセンの修正設計版。
テオ・ヤンセンリンクの研究や模擬戦の為にテレヤンセンを改造した機体である。
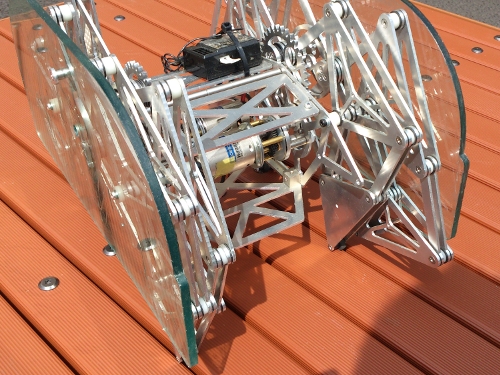
脚機構の大部分はテレヤンセンの流用だが、クランクを始めとする幾つかの新規部品は今年製作したテロートヤンセンと共通である。
これによりクランクの半径が2/3程度に縮小されたため、脚の振り上げ高さと移動速度は低下したもののクランクにかかる負荷は大幅に軽減されている。
また、機体の上下動は緩和され安定性も向上した。
脚以外のフレームははめ合わせを多用、パーツ数も減少し高い剛性を誇る。
腕機構まで設計するのは面倒だった為、昨年製作されたfaiの腕機構を流用できるように穴が開いている。
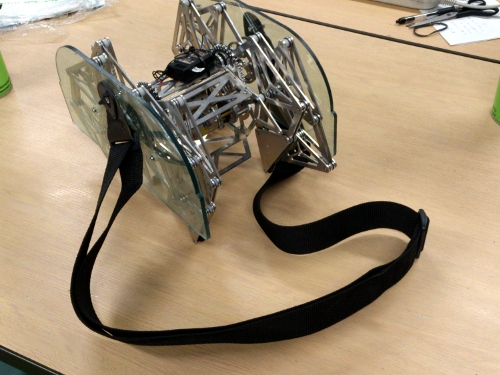
軽量省パーツ高剛性である上に肩紐も装備できる為、持ち運びしやすい。割とどうでもいいが大きな長所である。
|